Fahrdynamische Begriffe
Grundlagen
Fahrdynamik
Die Fahrdynamik untersucht die Vorgänge, die bei der Bewegung eines
Fahrzeuges ablaufen. Man beobachtet dabei das Zusammenspiel aller Kräfte, die
auf das Fahrzeug während der Fahrbewegung wirken. Die wirksamen Kräfte werden
von folgenden Parametern verursacht oder beeinflusst:
8 Fahrzeuggewicht 8 Beschleunigung
8 Verzögerung (Bremsen) 8 Fahrbahnunebenheiten
8 Kurvenfahrten 8 Luftströmung
Gemäß den drei Koordinaten im Raum unterteilt man die Fahrdynamik in die
Teilgebiete Längsdynamik, Querdynamik und Vertikaldynamik.
Koordinatensystem
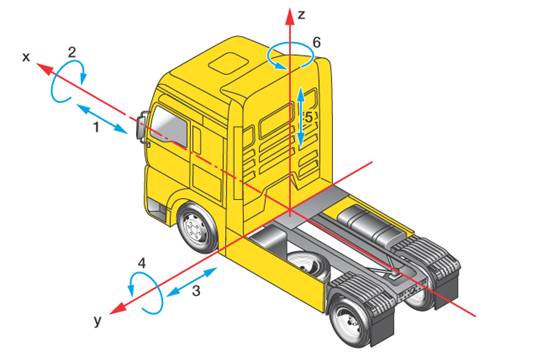
Für einen freibeweglichen Körper existieren insgesamt sechs
Freiheitsgrade im Raum. Einer für jede der drei Achsen im Koordinatensystem und
zusätzlich ist die Drehung um jede Achse möglich. (Bild 1)
Längsachse
Die Längsachse geht längs durch das Fahrzeug und entspricht der x- Achse
im Koordinatensystem. Sie ist nach vorn, das heißt, in Fahrtrichtung gerichtet.
Wege, Geschwindigkeiten und Beschleunigungen nach vorn werden deshalb als
positiv gewertet. Bremswege und Verzögerungen sind negativ definiert.
Drehschwingungen um die x- Achse werden als “Wanken” oder “Schlingern”
bezeichnet.
Querachse
Die y- Achse des Koordinatensystems wird Querachse genannt. Sie ist
senkrecht zur Fahrtrichtung und zur Längsachse angeordnet. Sie zeigt nach links,
das heißt, Bewegungen nach links werden als positiv betrachtet. Geradlinige
Schwingungen in Richtung der Querachse nennt man “Schütteln” oder
“Querschwingungen”. Drehschwingungen heißen “Nicken” bzw. “Stampfen”.
Hochachse
Die z- Achse wird als Hochachse bezeichnet. Sie steht rechtwinklig zur
Längs- und Querachse und zeigt nach oben. Geradlinige Schwingungen bezeichnet
man als “Heben” oder “Senken”, Drehschwingungen als “Gieren” bzw. “Schleudern”.
Entsprechend der Bewegung des Fahrzeugs in den sechs Freiheitsgraden
werden die drei Dynamikbereiche als:
4 Längsdynamik 4 Vertikaldynamik 4 Querdynamik
bezeichnet.
Zur Längsdynamik zählen das Beschleunigen und Verzögern. Die
Vertikaldynamik betrachtet das Heben, Senken, Nicken und Wanken. Zur
Querdynamik zählen die Querbewegungen und das Gieren.
Da Radlastschwankungen bei allen Fahrzeug- oder Aufbaubewegungen zur
Änder-ung der Seitenführungskräfte führen, beeinflussen sich die drei
Dynamikbereiche gegenseitig.
Bild 1 Fahrzeugbewegungen
im Koordinatensystem
x Längsachse
1 Beschleunigen, Verzögern
2 Wanken (Schlingern)
y Querachse
3 Querschwingen (Schütteln)
4 Nicken (Stampfen)
z Hochachse
5 Heben, Senken
6 Gieren (Schleudern)
Fahrwiderstände, Rollwiderstand
Fahrzeuglängsdynamik
Die Fahrzeuglängsdynamik ist ein Teilgebiet der Fahrdynamik. Sie befasst
sich mit allen in Fahrzeuglängsrichtung wirkenden Kräften.
Um ein Fahrzeug in Bewegung zu bringen, müssen Fahrwiderstände
überwunden werden. Wie jeder andere Körper aus Masse und Volumen auch, setzt
ein Fahrzeug dem Versuch, es zu beschleunigen und es in Bewegung zu halten,
verschiedene Fahrwiderstände entgegen. Man unterteilt den Gesamtwiderstand in
vier Hauptbestandteile:
8 Rollwiderstand 8 Steigungswiderstand
8 Beschleunigungswiderstand 8 Luftwiderstand
Je nach Fahrsituation wirken sich die einzelnen Fahrwiderstände
unterschiedlich stark aus. Bei der Entwicklung von Fahrzeugen versucht man die
Fahrwiderstände zu verringern, um so den Kraftstoffverbrauch zu verringern und
den Wirkungsgrad des Fahrzeugs zu verbessern.
Rollwiderstand
Der Rollwiderstand FR entsteht durch Form Änderungsarbeit beim
Abrollen der Räder auf der Fahrbahn. Er wird durch das Fahrzeuggewicht und
durch den Rollwiderstandsbeiwert uR bestimmt, der wiederum von der Art des
Reifens und der Fahrbahn abhängt. Je größer der Rollwiderstandsbeiwert und je
höher das Fahrzeuggewicht bzw. die Radlast GR umso größer ist auch der
Rollwiderstand.
FR = uR x GR = uR x m x g
Der Rollwiderstand
setzt sich zusammen aus:
4 Rollreibung 4 Walkarbeit
4 Luftreibung
im Reifen 4 Reibung
im Radlager
Der Rollwiderstand
lässt sich durch folgende Maßnahmen verringern:
4 Einsatzgerechte
Bereifung
4 Korrekte
Einstellung der Lenk- und Achskinematik
4 Regelmäßige
Kontrolle des Reifenluftdrucks.
Rollwiderstandsbeiwert
Mit zunehmender Belastung und abnehmenden Reifenluftdruck PL steigt der
Rollwiderstandsbeiwert und somit die zu überwindende Rollwiderstandsleistung.
Der
Rollwiderstandsbeiwert hängt von folgenden Faktoren ab:
4 Gefahrene Geschwindigkeit 4 Fahrzeuggewicht
4 Reifenbauart 4 Lenkgeometrie/
Achskinematik
4 Straßenzustand/
Fahrbahn
Kurvenwiderstandsbeiwert
In Kurven kommt zum Rollwiderstand der Kurvenwiderstand hinzu. Der
zugehörige Faktor ist der Kurvenwiderstandsbeiwert. Er hängt vom
Schräg-laufverhalten des Reifens ab.
Da sich der Reifen unter einem Schräglaufwinkel über die Fahrbahnoberfläche bewegt, baut
sich eine Seitenkraft Fs auf. Deren Sinusanteil erhöht den Gesamtrollwiderstand
FR . Gleichzeitig verringert sich der reine Rollwiderstand FRol auf seinen
Cosinusanteil.
F Rol = Fs x sin + F Rol x cos.
Steigungen
Zum Gesamtwiderstand zählt neben den zur Bewegung in der Ebene zu über-windenden
Roll- und Luftwiderständen zusätzlich der Steigungswiderstand.
Beschleunigen und
Verzögern
Über die bei gleichmäßiger Fahrt wirkenden Fahrwiderstände hinaus
entstehen beim Beschleunigen Massenträgheitskräfte entgegengesetzt zur Richtung
der Beschleunigung.
Da Verzögern ein negatives Beschleunigen darstellt, wirken in diesem
Fall die Trägheitskräfte mit der Bewegungsrichtung des Fahrzeugs. Den Anteil
der Trägheitskräfte nennt man Beschleunigungswiderstand.
Translatorisch und
rotatorisch
Der Beschleunigungswiderstand teilt sich auf in einen translatorischen
Teil, resultierend aus der Gesamtmasse des Fahrzeugs und einem rotatorischen
Teil, der durch die Massenträgheiten drehender Bauteile des Fahrzeugantriebs
entsteht. Letztgenannter Anteil ist für die Gesamtsumme der Fahrwiderstände
relativ unerheblich.
Steigungswiderstand
Der Steigungswiderstand ist der Anteil des Gesamtfahrwiderstands, der
durch die Topographie beeinflusst wird. Beim Befahren einer Steigung wirkt die
Hangabtriebskraft Fst entgegen der Fahrtrichtung des Fahrzeugs und bei einer
Gefällefahrt in Fahrtrichtung. Sie ist umso größer, je steiler der Anstieg oder
das Gefälle und je größer das Gewicht G des Fahrzeugs ist.
FsT = G x sin st
Hierbei gibt ST den Steigungs-
bzw. Gefällewinkel an.
Beschleunigungswiderstand
Massenträgheitskräfte wirken bei jeder Geschwindigkeitsänderung auf das
Fahrzeug. Je größer die Fahrbescheunigung a, das heißt , je schneller die
Geschwindigkeitsänderung erfolgt,
desto größer ist auch die zur Überwindung des Beschleunigungswiderstands
benötigte Kraft. Wie die Hangabtriebskraft, so steigt auch die
Beschleunigungskraft FT (tranlatorische Kraft) mit der Masse m des
beschleunigten Fahrzeugs.
FT = m x a
Verzögerung
Für die Verzögerung des Fahrzeugs gelten die gleichen Verhältnisse wie
für die Beschleunigung, nur in umgekehrter Richtung. Das bedeutet, beim Bremsen
schiebt die Trägheitskraft das Fahrzeug weiterhin in seine Bewegungsrichtung an
- bei Nfz durch deren hohe Masse ein sehr großer Faktor.
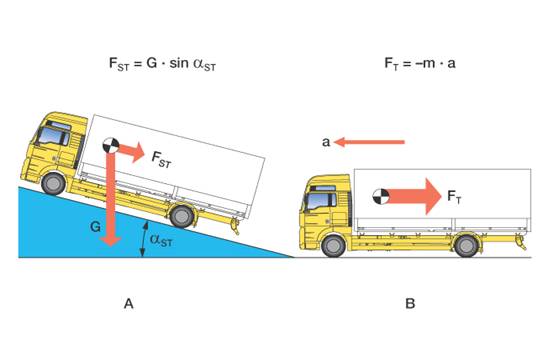
Steigungs- und Beschleunigungswiderstände
A Kräfte an Steigungen B Kräfte beim Beschleunigen
a Fahrzeugbeschleunigung m Masse des Fahrzeugs
ST Steigungswinkel G Fahrzeuggewicht
FST Steigungswiderstand FT Beschleunigungswiderstand
Fahrwiderstände,Luftwiderstand
Luftwiderstand
Neben dem Rollwiderstand bildet der Luftwiderstand den größten Anteil am
Gesamtwiderstand. Er entsteht wie der Rollwiderstand bei der Bewegung des
Fahrzeugs und steigt mit Erhöhung der Fahrgeschwindigkeit im Quadrat.
Der Luftwiderstand FL hängt von folgenden Faktoren ab:
8 Gefahrenen
Geschwindigkeit v
8 Größe
und Form des Fahrzeugs 8 Luftdichte
Die Berechnungsformel lautet: FL = 0,5
x CW x A
x p x v
Der Widerstand der durch die Form des Fahrzeugs entsteht, wird in
Wind-kanälen ermittelt und durch den Luftwiderstandsbeiwert (CW - Wert)
quantifiziert. Der Luftwiderstand lässt sich durch folgende Maßnahmen
verringern:
4 Einsatz
Vollverkleideter Fahrzeuge (Dachspoiler, Bugschürze, Seitenver- kleidung usw.)
4 Strömungsgünstige
Formenentwicklung an Zugfahrzeugen und Anhängern
4 Aufbauten mit Plane straff verzurrt
bzw. auf niedrigste Stufe eingestellt.
Beispiel: Bei einem Nfz
mit einer Motorleistung von 301 kw (410 PS), mit einem Gesamtgewicht von 40t und einer
Fahrgeschwindigkeit von 85km/h
betragen Luftwiderstand und Rollwiderstand jeweils 33 % .
Überschussleistung für Beispiel Bild
40 t zGG 301
kw 410 PS Motorleistung

Anteile von Luftwiderstand, Rollwiderstand und Überschussleistung.
Aerodynamik Aerodynamische
Grundbegriffe
Aerodynamik
Die Aerodynamik beschäftigt sich als teil der Physik mit allen
Vorgängen, die bei der Umströmung und Durchströmung eines Körpers beobachtet
werden können.
Der Luftwiderstand eines Fahrzeugs wird im Strömungskanal ermittelt. Der
charakteristische Wert, der den Luftwiderstand beschreibt , ist der
Luftwider-standsbeiwert.
Niedrige CW- Werte bedeuten geringen Luftwiderstand und ermöglichen eine
höhere Endgeschwindigkeit sowie einen geringeren Kraftstoffverbrauch. Im Zuge
steigender Kraftstoffpreise wird eine günstige Aerodynamik auch für Nfz immer
bedeutsamer. Von den meisten Nutzfahrzeugherstellern, die den CW - Wert
verbessern. Der Trend geht hin zum “Vollverkleideten” Nutzfahrzeug.
Luftwiderstand
Mit steigender Geschwindigkeit eines Fahrzeugs erhöht sich auch sein
Luft-widerstand. Die Zunahme des Luftwiderstands bei steigender Geschwindigkeit
erfolgt im Quadrat, das heißt bei einer Verdoppelung der Geschwindigkeit
vervierfacht sich der Luftwiderstand. Bei einer Geschwindigkeit von 85 km/h
beträgt der Luftwiderstand mehr als 40 % der gesamten Fahrwiderstände.
Der Luftwiderstand
eines angeströmten Fahrzeugs setzt sich zusammen aus den Anteilen: 8 Druckwiderstand 8 Induzierter Widerstand
8 Oberflächenwiderstand 8 Innerer
Widerstand
Druckwiderstand
Der Druckwiderstand wird durch die Größe der Gebiete turbulenter,
abgelöster Strömung bestimmt. Hauptanteil hat hierbei die Größe der
Heckabrisszone. An Stellen, an denen die Strömung abreißt entsteht Unterdruck,
der den Druckwiderstand auslöst. Prinzipiell versucht man, kleine Abrissflächen
und damit kleine Unterdruckzonen zu realisieren. Dies ist im Nfz- Bereich
besonders schwierig, weil ein maximales Ladevolumen angestrebt wird und damit
bestimmte, meist kastenförmige Aufbauformen bevorzugt werden.
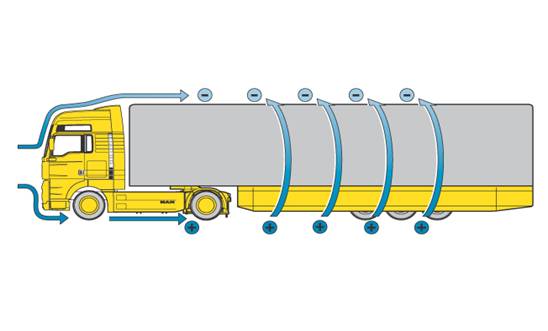
Induzierter
Luftwiderstand
Der Induzierte Luftwiderstand zählt zum Druckwiderstand und entsteht
durch die bei der Bewegung entstehenden Luftdruckunterschiede zwischen
Querseite und Unterseite des Fahrzeugs. Druckwiderstand und induzierter
Widerstand zusammen bilden mit 50 bis 90 % den größten Anteil des
Gesamtluftwiderstands.
Oberflächenwiderstand
Als Oberflächenwiderstand bezeichnet man den Reibungswiderstand, den die
“Außenhaut” des Fahrzeugs der anliegenden (laminaren) Luftströmung
entgegensetzt. Er wirkt bei allen langen Fahrzeugen, wie Sattelzügen und Bussen
verstärkt aus. Am Gesamtluftwiderstand ist der Oberflächenluftwiderstand mit
etwa 3 bis 30 % beteiligt.
Innerer Luftwiderstand
Der innere Luftwiderstand ist der Anteil des Luftwiderstands, dem das
Fahrzeug aufgrund seiner Durchströmung zur Aggregatkühlung und Innenraum- bzw.
Fahrerhausbelüftung ausgesetzt ist. Der Anteil des inneren Widerstands am
Gesamtluftwiderstand beträgt etwa 3 bis 11 %.
Bild induzierter Luftwiderstand: - Unterdruck + Überdruck
Aerodynamik
Aerodynamische
Maßnahmen
Fahrzeugdesign
Durch die Abrundung der Frontpartie des Fahrerhauses in Verbindung mit
Luftelementen und die Verwendung einer Bugschürze kann das Fahrzeug-design
strömungstechnisch optimiert werden.
Ein strömungsgünstig gestaltetes Fahrerhaus allein bewirkt jedoch eine
verstärkte Anströmung des nicht optimierten Aufbaus. Der dann insgesamt
erreichte Cw- Wert ist sogar höher als der eines Nfz mit kantigem Fahrerhaus
und nicht optimiertem Aufbau. Der Grund dafür ist, dass bei einem kantigen
Fahrerhaus die Frontpartie des Aufbaus in einer Ablösezone liegt und somit
einem geringeren Luftwiderstand ausgesetzt ist.
Luftleiteinrichtungen
Um eine gute strömungstechnische Abstimmung von Fahrerhaus und Aufbau zu
realisieren, setzt man zusätzlich abschirmende Luftleiteinrichtungen
ein. Man unterteilt sie in drei Gruppen:
8 Luftleitschilde auf dem
Fahrerhaus
8 Anströmkörper am Aufbau
8 Seitenverkleidungen am
Fahrgestell
Vollverkleidete Nfz erreichen beste Verbrauchswerte und erhöhen so den
Nutzen für den Fuhrparkbetreiber.
Luftleitschilde auf
dem Fahrerhaus
Die optimale strömungstechnische Abstimmung von Fahrerhaus und
Frontpartie des Aufbaus ist von hoher Bedeutung. Ein Dachspoiler auf dem
Fahrerhaus, der gegebenenfalls verlängert und durch Seitenklappen (side-flaps)
und Dachansätze ergänzt wird. Kann den Luftwiderstand eines Nfz mit Aufbau
erheblich reduzieren.
Anströmkörper am
Aufbau
Eine Verbesserung des Luftwiderstandsbeiwertes durch die Veränderung der
äußeren Form des Aufbaus ist bei Nfz nur in geringem Maß möglich, da durch eine
Abrundung der Ecken und kanten des Aufbaus der Laderaum verkleinert wird, und
somit Ladevolumen abnimmt. Spezielle Anströmkörper an der Frontpartie des
Aufbaus verringern den Luftstrom, der in der Ablösezone der Luftleitschilde des
Fahrerhauses vor den Aufbau gelangen kann
Seitenverkleidung
Neben der angesprochenen Verringerung des Luftwiderstands durch die Form
von Fahrerhaus und Aufbau wird das Fahrzeug auch durch eine Verkleidung des
normalerweise freiliegenden Fahrgestells aerodynamisch optimiert. Sie
verringert vor allem bei Seitenwind den Luftwiderstand des Nfz.
Vollverkleideter Sattelzug der MAN Trucknology Generation
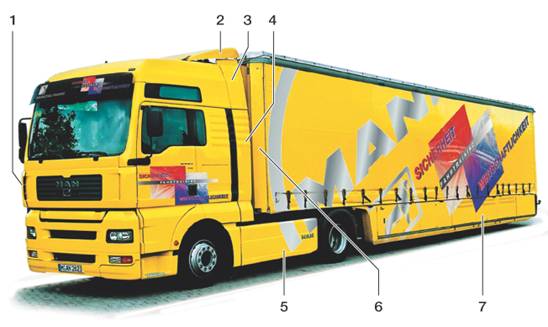
1 Fahrerhaus- Frontpartie
abgerundet mit Luftleitelement und Bugschürze
2 Dachspoiler 3 Dachansatz 4 Seitenklappe (sideflaps)
5 Fahrgestell-
Seitenverkleidung 6 Anströmkörper (Aufbau)
7 Fahrgestellverkleidung
(Aufbau)
Antriebskräfte und Aquaplaning
Antriebskräfte
Zum Überwinden der bisher beschriebenen Fahrwiderstände müssen an den
Rädern der angetriebenen Achse(n) ausreichend hohe Antriebskräfte zur Verfügung
stehen. Für das Befahren von Steigungen oder zum Beschleunigen sind
entsprechende Kraftreserven notwendig. Nur Fahrzeuge mit hohen
Leistungsreserven erreichen auf bergigen und überholintensiven Strecken hohe
Durchschnittsgeschwindigkeiten.
Bodenhaftung
Sowohl für das effiziente Übertragen der Antriebskräfte als auch für die
sichere Verzögerung ist ein ausreichender Kraftschluss zwischen den Reifen und
der Fahrbahnoberfläche erforderlich. Die Haftreibung muss entsprechend groß
sein.
Können die am Fahrzeug angreifenden Kräfte von der Reifenaufstandsfläche
(Reifenlatsch) nicht vollständig auf die Fahrbahnoberfläche übertragen werden,
kommt es zum Verlust der Bodenhaftung und das Fahrzeug bricht aus.
Wirksame Antriebskräfte
Je größer das vom Motor abgegebene Drehmoment M ist, desto größer kann
die an den Berührungsflächen zwischen den Reifen und Straße wirksame
Antriebskraft F Ant. werden.
F Ant. = (M x i) / r
Die Antriebskraft steigt mit zunehmender Gesamtübersetzung i und
verringert sich mit steigendem Reifenradius r bzw. Reifendurchmesser.
Die Gesamtübersetzung ist das Produkt aus der Hinterachsübersetzung und der
Getriebeübersetzung. Beide sind auf den Einsatz des Fahrzeugs abgestimmt.
Aquaplaning
Probleme bei der Kraftübertragung Reifen/ Straße können sich bei
regen-nasser Fahrbahn ergeben. Der Haftreibungsbeiwert ist grundsätzlich
abhängig von Fahrgeschwindigkeit, Reifen- und Fahrbahnzustand. Bei nasser
Fahrbahn sinkt der Haftreibungsbeiwert sehr stark, da ein Teil der
Gesamtreibung aus Flüssigkeitsreibung besteht. Kommt es zum auf schwimmen des
Reifens auf dem Wasserfilm, spricht man von Aquaplaning. Bei Auftreten von
Aquaplaning können weder Brems- noch Lenkkräfte auf die Fahrbahn übertragen
werden, da es sich dann um eine Flüssigkeitsreibung handelt. Ein Wasserkeil schiebt
sich dabei unter
die gesamte Aufstandsfläche des Reifens und hebt ihn vom Boden ab. Zu
diesem Effekt kommt es umso leichter, je schlechter das Profil, je höher der
Abnutzungsgrad des Reifens, je höher die Geschwindigkeit und je größer die
Wasserhöhe auf der Fahrbahn sind. Hohes Fahrzeuggewicht und damit hohe
Anpresskräfte zwischen Reifen und Fahrbahn verringern die Neigung zum
Aquaplaning.
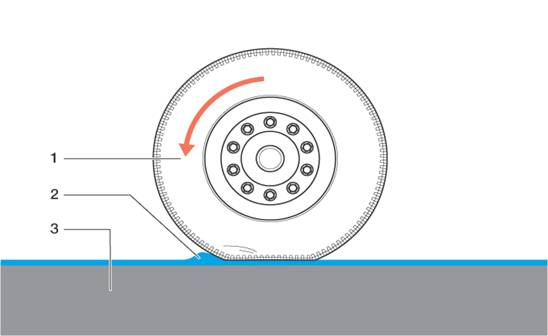
Aquaplaning 1 Reifen 2 Wasserkeil 3 Fahrbahn
Fahrzeugquerdynamik
Fahrverhalten und
Seitenführung
Fahrzeugquerdynamik
Die Fahrzeugquerdynamik als Teilgebiet der Fahrzeugdynamik behandelt
alle Bewegungen und Kräfte quer zur Bewegungsrichtung des Fahrzeugs.
Fahrstabilität
Das System Fahrer- Fahrzeug sollte sich unter dem Einfluss von äußeren
Störungen bezüglich der vorgegebenen Kurswahl stabil verhalten, denn der Fahrer
als Regelmechanismus verfügt nur über begrenzte Eingriffsmöglich-keiten.
Moderne elektronische Systeme wie EBS und ESP sind in der Lage, viele kritische
instabile Fahrsituationen durch gezielte Eingriffe, z. B. an einzelnen Rädern
zu stabilisieren.
Fahrverhalten
Das Fahrverhalten
bezieht sich nur auf Eigenschaften des Fahrzeugs. Unter gutem Fahrverhalten
versteht man:
4 Wenn
ein sinnvoller Zusammenhang zwischen Lenkwinkel und Kursänderung besteht
4 Wenn
dem Fahrer sinnvolle Informationen (z. B. Reifengeräusch) über den Bewegungszustand des Fahrzeugs gegeben werden.
4 Wenn
von außen einwirkende Störungen (z. B. Seitenwind) nur geringe Kursabweichungen hervorrufen.
4 Wenn
die erreichbaren Kurvengeschwindigkeiten und Querbeschleu- nigungen im Hinblick auf die
Fahrsicherheit und Leistung hoch sind.
Seitenführungskräfte
Wirken Kräfte von außen auf das Fahrzeug ein, wie Seitenwind oder
Zentrifu-galkräfte bei Kurvenfahrt, entstehen durch Haftreibung in den
Reifenauf-standsflächen entgegen gesetzte Reaktionskräfte. Diese
Seitenführungskräfte haben das Bestreben, die Reifen in seiner Abrollrichtung
und damit das Fahrzeug auf Kurs zu halten. Da jedoch die Haftreibung begrenzt
ist und sich der reifen unter den äußeren Kräften verformt, rollen Reifen dann
immer unter Schräglaufwinkel ab.
Die Höhe der
Seitenführungskräfte Fs hängt von mehreren Bedingungen ab:
8 Fs steigt mit dem Schräglaufwinkel
8 Fs steigt mit der Radlast
8 Fs steigt mit dem Luftdruck bis auf ein Maximum und fällt dann
wieder
8 Fs steigt mit dem Haftreibungsbeiwert der
Fahrbahnoberfläche
8 Bauart
und Profilierung des Reifens beeinflussen ebenfalls die Seitenführungskräfte Fs.
Zu jedem Zeitpunkt der Fahrt sollten aus Gründen der Fahrstabilität und
des Fahrverhaltens die äußeren Kräfte und die von den Reifen aufgebauten
Seitenführungskräften im Gleichgewicht stehen. Ist dies nicht der Fall, kommt
es zu instabilen, unkontrollierten Fahrzeugbewegungen innerhalb der sechs
Freiheitsgrade. Das elektronische Stabilitätsprogramm ESP kann dies verhindern.
Bezogen auf die Fahrzeugquerdynamik sind die Querbewegungen und das
Gieren von besonderer Bedeutung. Da das Wanken in Kurven starke Radlast
änderungen zur Folge und damit große Auswirkungen auf die Seitenführungskräfte
hat, wird diese Fahrzeugbewegung auch querdynamisch betrachtet.
Kurvenverhalten
Bei der Fahrt auf einer Kreisbahn greift die Fliehkraft Fc im
Schwerpunkt des Fahrzeugs an und wirkt in radialer Richtung vom Mittelpunkt der
Kreisbahn nach außen. Sie nimmt mit steigender Masse und gefahrener
Geschwindigkeit des Fahrzeugs und
abnehmendem Kurvenradius zu.
Querbeschleunigung
Die die Fliehkräfte abstützenden Seitenführungskräfte der Reifen
bewirken die Querbeschleunigung des Fahrzeugs Richtung Kurvenmittelpunkt.
Je nach stärke der Fliehkräfte kommt es zu unterschiedlich großen
Schräglaufwinkeln der Räder. Mit zunehmender Querbeschleunigung steigen diese
an.
Radlastunterschiede
Alle oberhalb der Fahrbahnoberfläche auf das Fahrzeug einwirkende Kräfte
haben Radlastunterschiede zur Folge.
Diese Radlastunterschiede verringern die möglichen Seitenführungskräfte
bei gleich bleibenden Schräglaufwinkeln. Im anderen Fall müssen die Außenkräfte
und damit die aufzubringenden Seitenführungskräfte durch größere
Schräglaufwinkel, also bei Bedarf stärkeres Einlenken, realisiert werden.
Kurvenfahrt
Zwei grundlegende negative Auswirkungen auf das Fahrzeug lassen sich bei
Kurvenfahrt beobachten:
4 Schleudern
und Ausbrechen (Gieren)
4 Neigung
zum Kurvenaußenrand (Wanken)
Schleudern oder Ausbrechen können durch das ESP weitestgehend vermieden
werden.
Gieren
Bewegt sich das Fahrzeug nicht nur geradlinig in positiver Richtung
entlang seiner Längsachse X, sondern dreht sich um die Hochachse Z,
spricht man von Gieren.
Erfolgt diese zusätzliche Rotation in gleicher Richtung wie die der
Fahrzeuglängsachse über dem Untergrund, übersteuert das Fahrzeug, andernfalls
untersteuert es.
Das Giermoment MG entsteht durch die Produkte der äußeren Kräfte
und der Seitenführungskräfte der einzelnen Räder mit ihren jeweiligen
Hebelarmen zum Schwerpunkt S.
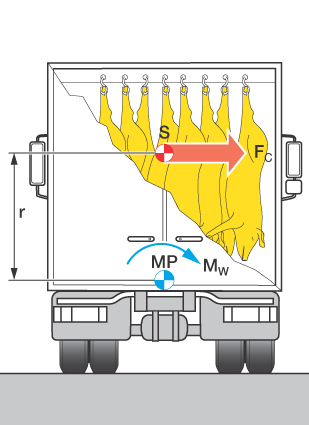
Wanken
Durch die im Schwerpunkt des Fahrzeugs angreifenden Fliehkräfte oder
durch die resultierende kraft des Seitenwindes auf dem Flächendruckpunkt kommt
es zur Neigung des Fahrzeugs aus der Kurve.
Die Neigung bzw. der Wankwinkel hängt von den Federraten der Federung
und der Stabilisatoren und dem Abstand r des Schwerpunktes vom Momentanpol
(Wank- oder Rollachse) ab.
Der Momentanpol oder die Rollachse des Fahrzeugs ist die gedachte Achse,
um die sich das Fahrzeug bei der Wankbewegung dreht (Bild).
Es entsteht ein Wankmoment Mw um die Rollachse aus der Kraft und
dem Hebelarm r.
Je höher der Schwerpunkt und je tiefer die Rollachse eines Nfz. Liegen,
desto größer wird das Wankmoment und der damit verbundene Wankwinkel. Bei der
Konstruktion und vor allem beim Beladen von Nfz. Sollte deshalb unbedingt auf
einen niedrig liegenden Schwerpunkt geachtet werden.
Wanken erhöht die Radlasten der Kurvenäußeren Räder sehr stark.
Giermoment Linkskurve
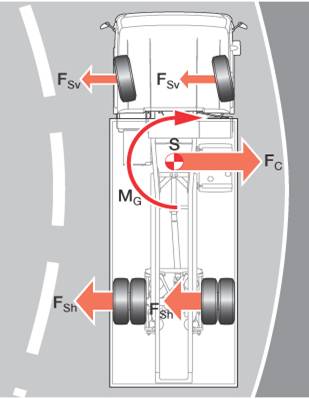
Legende: Fc = Zentrifugalkraft
(Fliehkraft)
Fs = Seitenführungskraft
S = Schwerpunkt
MG = Giermoment
Mw = Wankmoment
r = Hebelarm
des Wankmoments
MP = Momentanpol
Wankmoment Linkskurve
Seitenwind
Vor allem Nfz. Sind aufgrund ihrer Größe und Höhe großer Belastung durch
Seitenwind ausgesetzt. Besonders bei plötzlich einsetzenden Seitenwind, wie er
beim Überholen oder aus dem Ausfahren aus einem Einschnitt oder Tunnel
auftritt, wird die Wirkung spürbar. Dies kann bei hohen Fahrgeschwindigkeiten
sogar zur seitlichen Versetzungen des Fahrzeugs führen. Die durch den
Seitenwind verursachte Kraft ist eine Flächenkraft. Diese lässt sich durch eine
Einzelkraft, die im Druckpunkt der Flächen angreift, ersetzen. Je nach Lage von
Druck- und Schwerpunkt zueinander kann es zu seitlichen Versetzungen oder zum
Ab- und Eindrehen (Gieren) des Fahrzeugs kommen.
Seiten- und Umfangskräfte
Während jeder Fahrt müssen seitlich wirkende Kräfte und Umfangskräfte.
Also Antreiben oder Bremsen, oft gleichzeitig von den Reifen auf die Fahrbahn
übertragen werden. Ein frei rollendes Rad kann maximale Seitenführungskräfte
aufbauen. Müssen über dieses rad aber gleichzeitig Umfangskräfte auf den
Untergrund übertragen werden, verringern sich die möglichen
Seitenfüh-rungskräfte. Die möglichen Verhältnisse zwischen Seiten- und
Umfangskräften bei Kurvenfahrt unter den vorgegebenen Schräglaufwinkel werden
in dem Seitenkraft- Traktionskennfeld nach Krempel verdeutlich . Die Hüllkurve
H liefert Werte über die in beliebiger Richtung maximal übertragbaren Kräfte.
Wird während der Kurvenfahrt gebremst oder angetrieben, kann es zum Ausbrechen
des Nfz kommen, weil die maximal möglichen Seitenführungskräfte nicht mehr dazu
ausreichen, den Kurs zu halten.
Bremsen bei Kurvenfahrt
Rollt das Nfz in der Kurve mit gleich bleibender Geschwindigkeit ( Punkt
A) und geringen Antriebskräften dahin, befindet man sich mit den geforderten
Seitenführungskräften innerhalb der Hüllkurve H- ein stabiler Fahrzustand,
Taucht nun plötzlich ein Hindernis auf und der Fahrer muss bremsen,
wechseln die Umfangskräfte die Richtung und steigen gleichzeitig stark an. Da
die Kurvengeschwindigkeit aber noch nicht verringert wurde, bleiben die
notwendigen Seitenführungskräfte gleich groß, können aber bei dem vorgenommenen
Schräglaufwinkel nicht realisiert werden. Der Betriebspunkt wandert durch zu
starkes Bremsen von A nach B (Punkt B) und liegt damit außerhalb der Hüllkurve.
Ein untersteuerndes Nfz schiebt sich über die Vorderräder aus der Kurve.
Durch weniger starkes Bremsen und stärkeres Einlenken (größerer
Schräglaufwinkel) kann das Fahrzeug noch sicher verzögert werden. Punkt C liegt
noch innerhalb der Hüllkurve. Stärker gebremst werden kann erst, wenn die
Geschwindigkeit und deshalb die Seitenführungskräfte geringer geworden sind
(Punkt D).
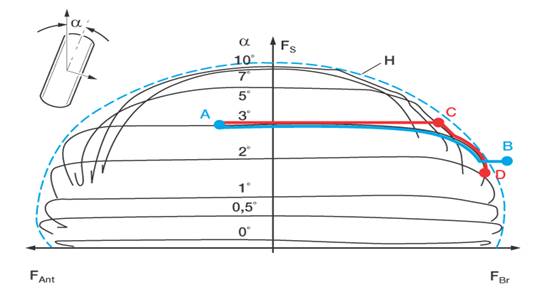
Seitenkraft- Traktionskennfeld nach Krempel
A-D Betriebspunkte bei
Kurvenfahrt
FAnt. Antriebskraft am Reifenumfang
F
Br. Bremskraft am
Reifenumfang
Fs Seitenführungskraft
H Hüllkurve
Schräglaufwinkel